
Concept Renders
Over the last 27 years I have designed thousands of robots. Over the last 10 years I’ve been making them into CAD models. This is a short collection of images of robots I had ideas for and some I built.

This bot was called Future Trash. A retro hot rod looking beast. The chassis would be round trube with AR500 body panels. The engine block would house all the drive motors. The motors would drive a bevel gear that would either drive the rear wheels or the steering. The front two “Cylinders” would drive the steering rack and the rear six cylinders would drive the rear wheels via a dif. The front plough would offter miniumal protection with a large electric hammer would offer the offense of the robot. The hammers hinge would mount to a front bar that housed the lights which are just disposable lights and nothing that couldn’t be sacrificed. Not intended to be a competitive robot but a really good looking robot.
This is the original plan for Predator. Bassically just Foxic but wider and running larger motors, the A40-300 motors. This was the first instance of trying to make a grab lift but with a saw included in the tail. I would later attempt to do this on Foxic. The original name for Predator was Fenrir, and we kept the name upto the month before filming in 2018
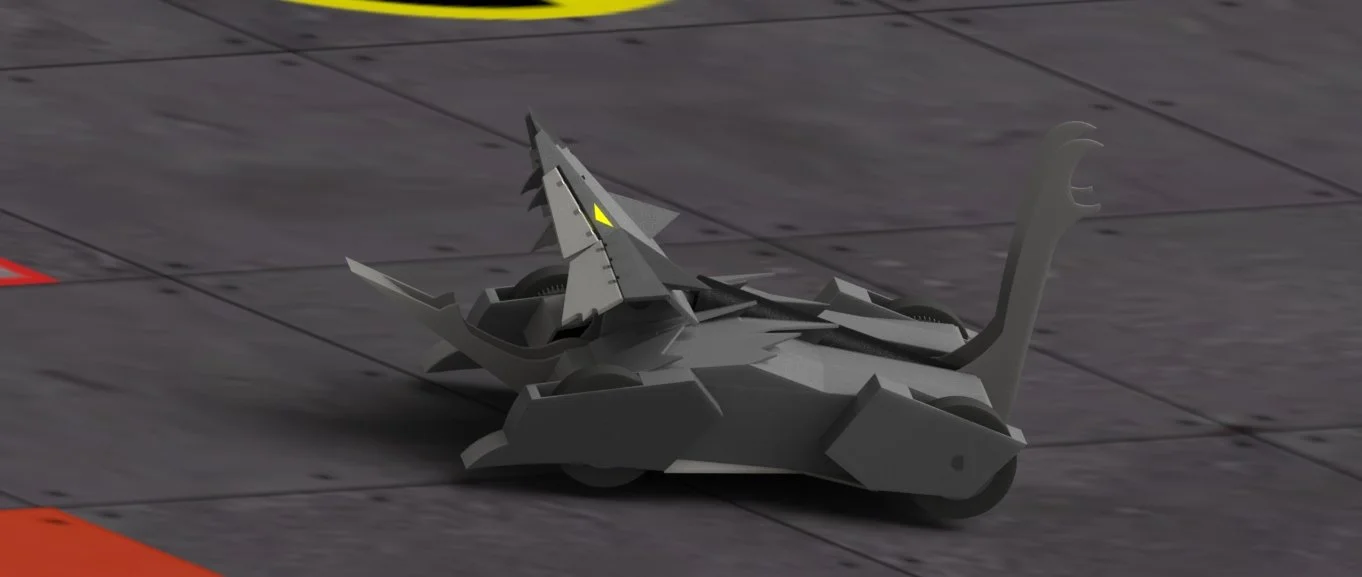
This was one of the more complex version of Predator. The tail and head were not connected in this version, it had seperate systems and would be hydraulic. The “cheeks” were hinged so that the more of the jaw would be expoded as it bit down meaning it could have bitten down deeper than the version we actially made.
This was the ideal version of Predator, we thought we had more time in the run up to being a part of Battlebots, in the end we got the go ahead 6 weeks before filming, losing 2 weeks for shipping right at the time I had just immigrated to America. We had to simplify the robot and build it as quickly as possible. The chassis was made in England and shipped 4 weeks before filming but there were multiple snow storms and the crate took 4 weeks to be delivered. We had to divert the unfinished robot to filming and had just 3 days to finish the robot.

Just a neat image of Predator and Foxic in the Battlebox

This was where the tail saw grab lift system started to be developted. We actual made the tail and its waiting to go on to Foxic which I will rebuild one day. The tail works exactly like Slammos
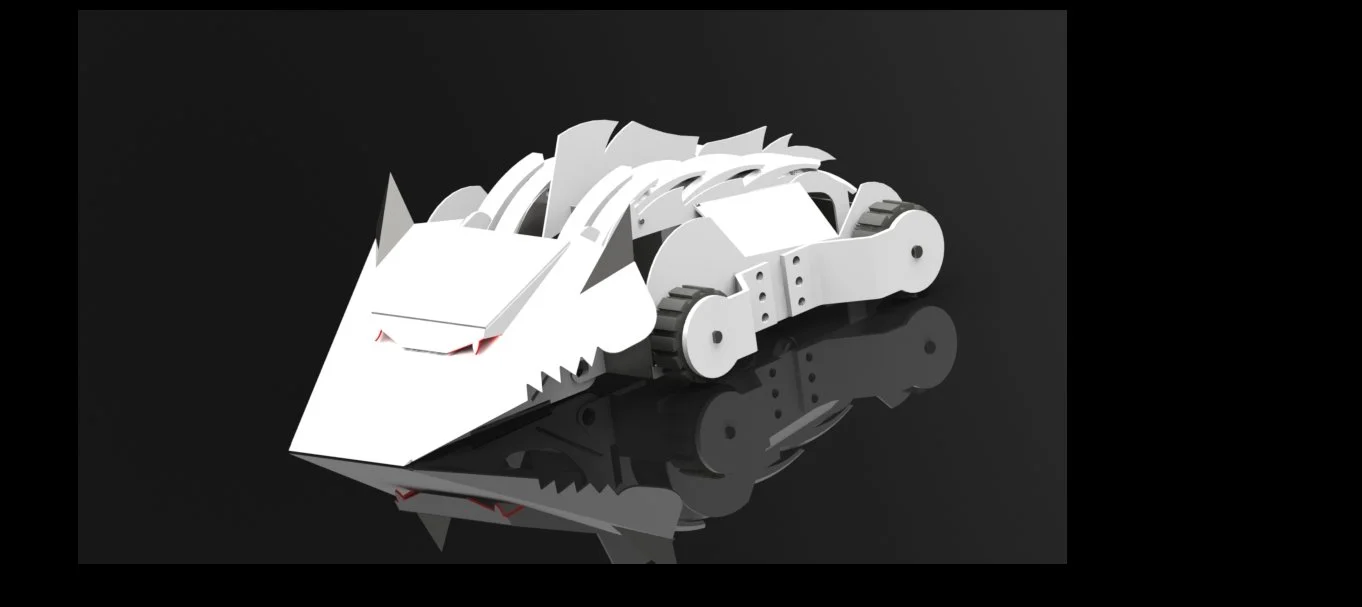
This was the first version of Hyena for Clash Bots. The drive was teo large LEM200 motors and the “hair fins” were hinged and the shaft had a cam mecanism on them so that the would move when the robot was switched on, giving it the effect of breathing. Robot presented in these images before settling on a colour scheme.
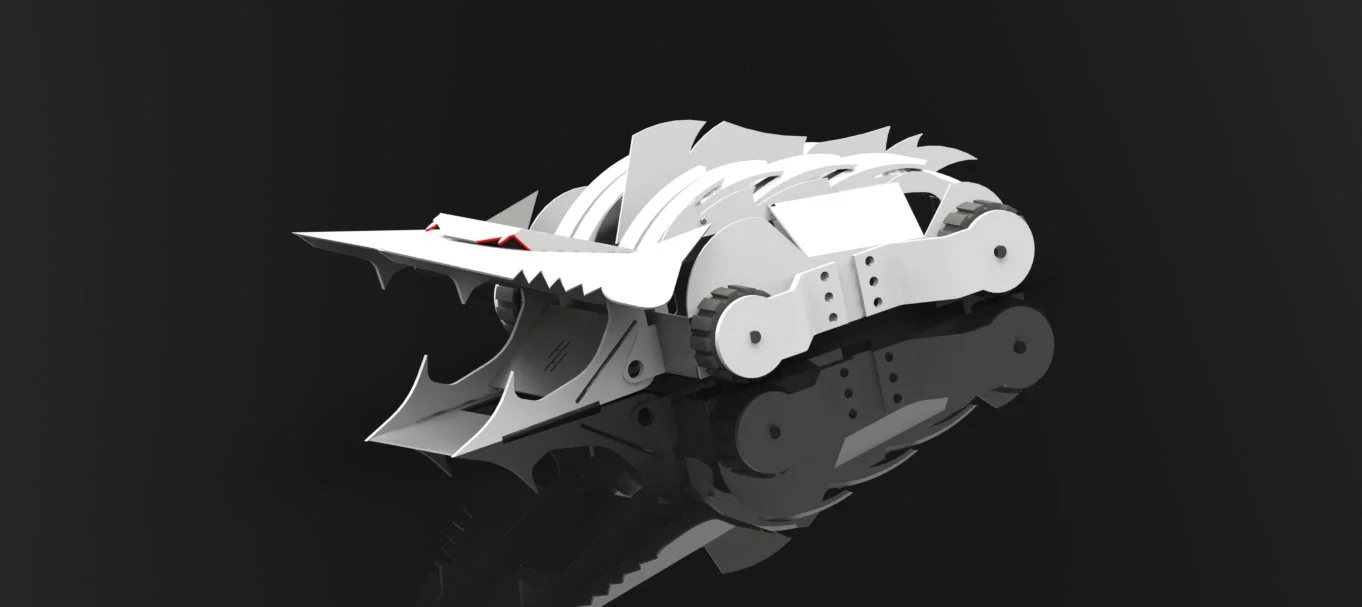
The Jaw on hyena was on a chain system. I’m not sure how to explain, but I’ll try. The head wasn’t on a single pivot it was bolted to two #50 chains, and the chain would run up the back. The mohawk fin on the back would act as a limit and rotate the head vertically. The head would lift up, then flip up before locking and reversing to lower the jaw back down. The ends of the head would follow a track to give it stability. It would also breathe fire, the idea being that it would lift up and then flip and burn the opponent.

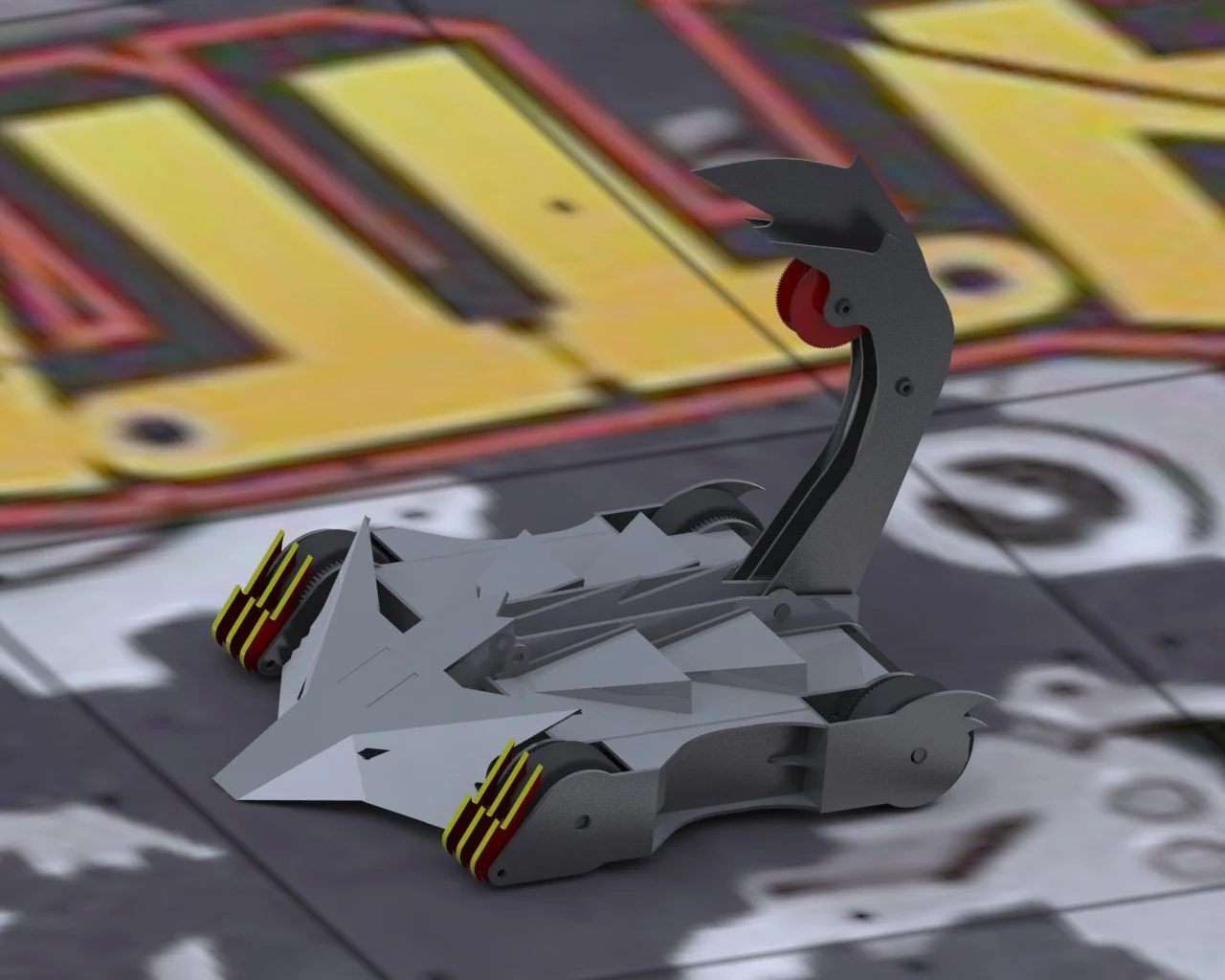
This scorpion has been on my mind for years, 20 years or so really. This version was what we initially pitched to Clash Bots but they wanted something like Foxic instead. This version has 12 legs each with 2Dof. The idea was to have layered armour on top that would be jointed so it would really look organic as it moved.
We’re redesigning this right now to take to Battlebots Creature Combat in 2026
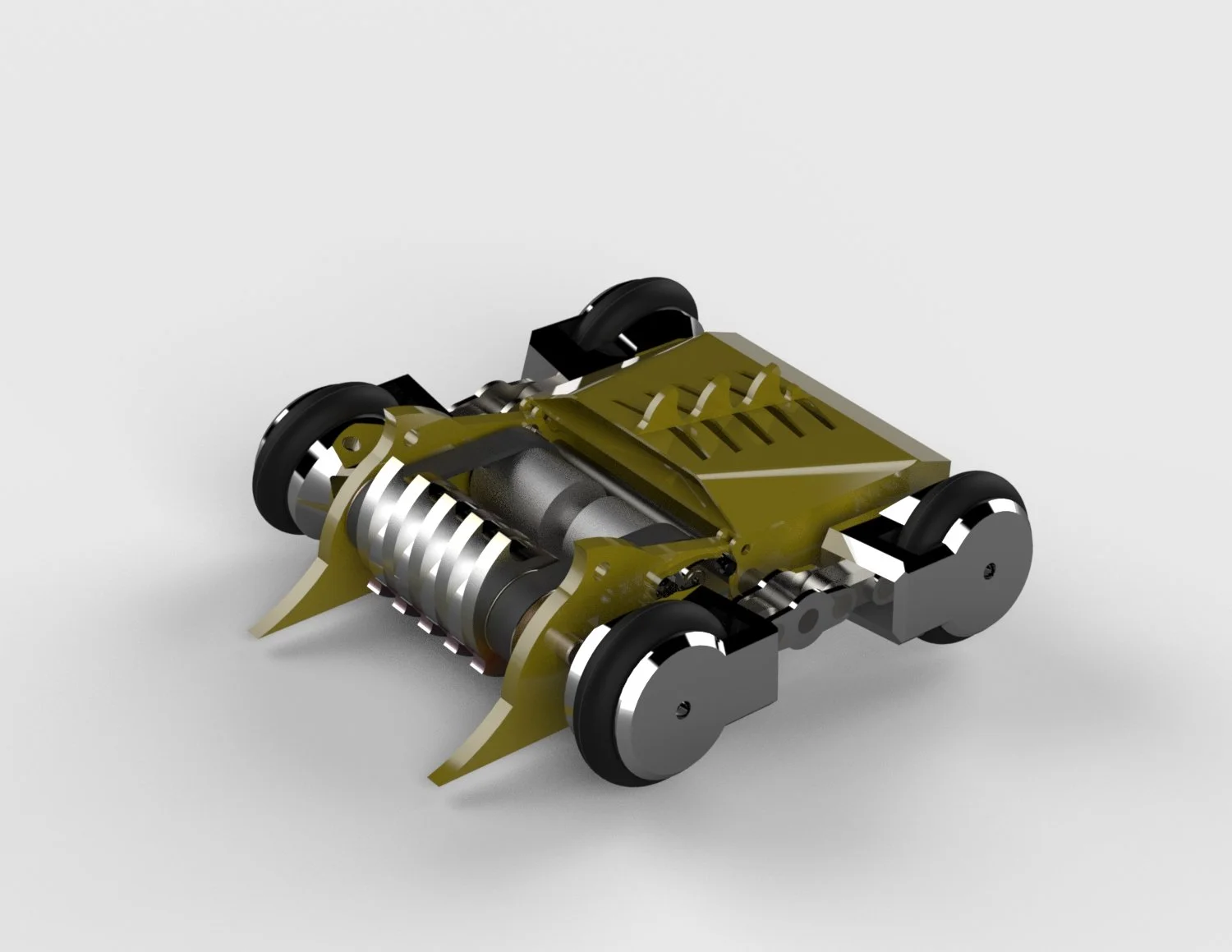
This was a robot I designed for someone else, This had two 80100 brushless motors spinning the drum with the whole robot built around a central pivot. The front weapon would balance out the back of the robot where the batteries and controllers would sit in a multi layered armoured compartment. It would be sprung to keep it off the floor. The wheel pods would be hub motors and woudl also be hinged in two directions, each wheel pod can rotate 30 degrees up and down and 15 degrees off center to create a camber effect. The idea was to make a robot can flex and bounce and slightly counter the gyro effect of the weapon.
A massively overly complex robot but a really fun concept.

This was the original pitch of SlamMow. We did not original intend for it to be modular this was the intention the wedge with hidden arms which was my favourite set up, which is probably why I ran it so much.

This was the version that we liked the most. It was the version that got made first and it was probably the most successful set up. This was the first render we did of the finished design.